Robotic Hand
An attempt to build dexterity into a low-cost mechanical hand without surrendering elegance or realism.
Goals
Robotic hands are fascinating because they sit at the meeting point of mechanics, control, and anatomy. I wanted to build a low-cost platform that was not merely functional, but useful as a thinking tool: a hand that could be reproduced, modified, and studied as different actuation methods and design ideas were tested against the stubborn realities of physical movement.
Prototype Progression
- Prototype One
-
The first prototype established key baselines, including the relative success of servo-driven tendon routing and how well inexpensive parts could hold alignment under load.

- Prototype Two
-
The second prototype was lighter and lower profile. I switched to rolling contact joints, using 0.2 mm fishing line as the contact surface instead of bulky axles. This reduced friction and simplified the assembly.
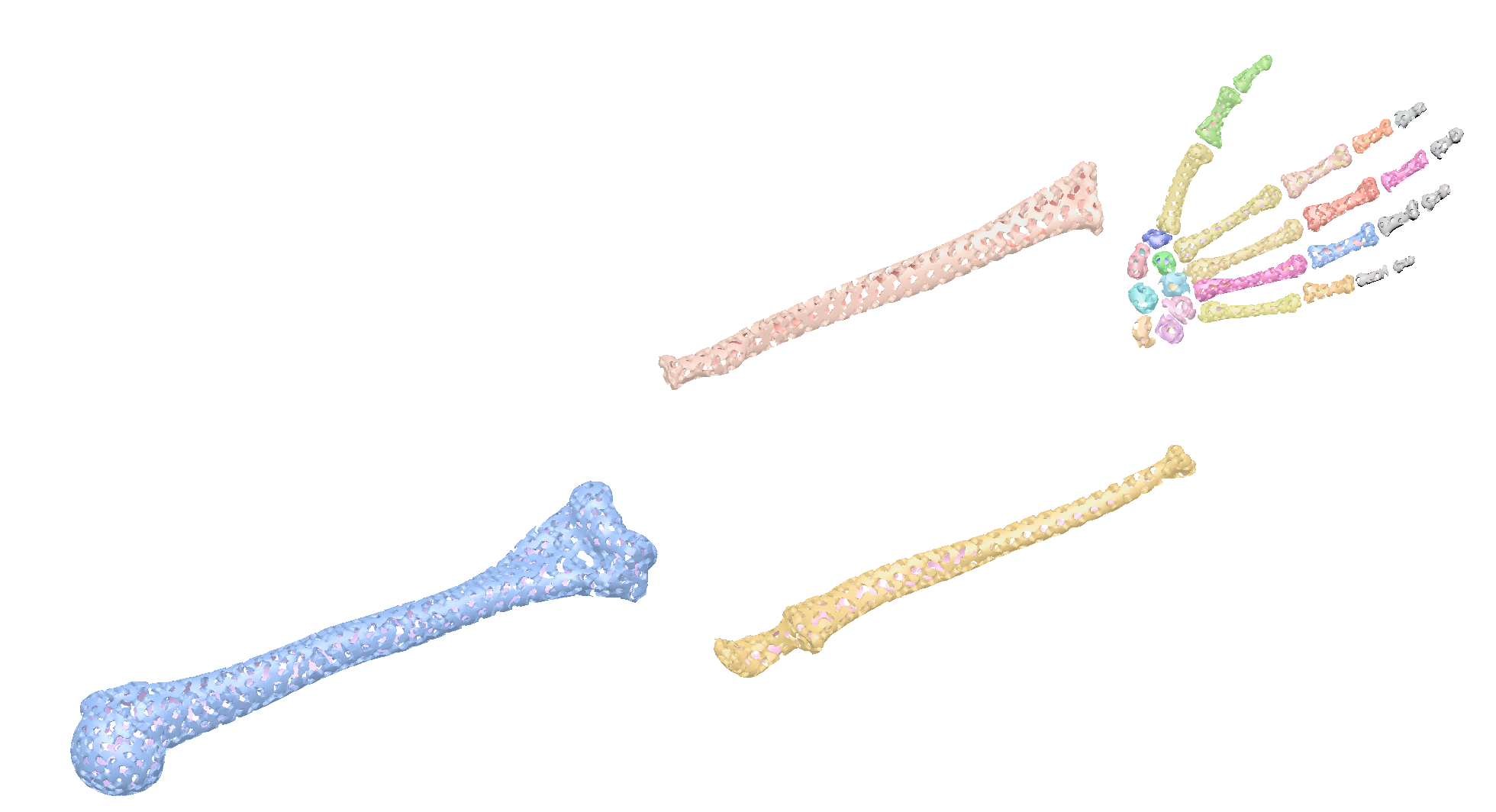
- Prototype Three
-
The third prototype was the most ambitious and also the easiest to assemble. I scanned a human hand skeleton and connected each segment to mimic biological joints. This created a more realistic imitation of the forces involved, with the goal of inheriting the advantages built into human anatomy.
Design Themes
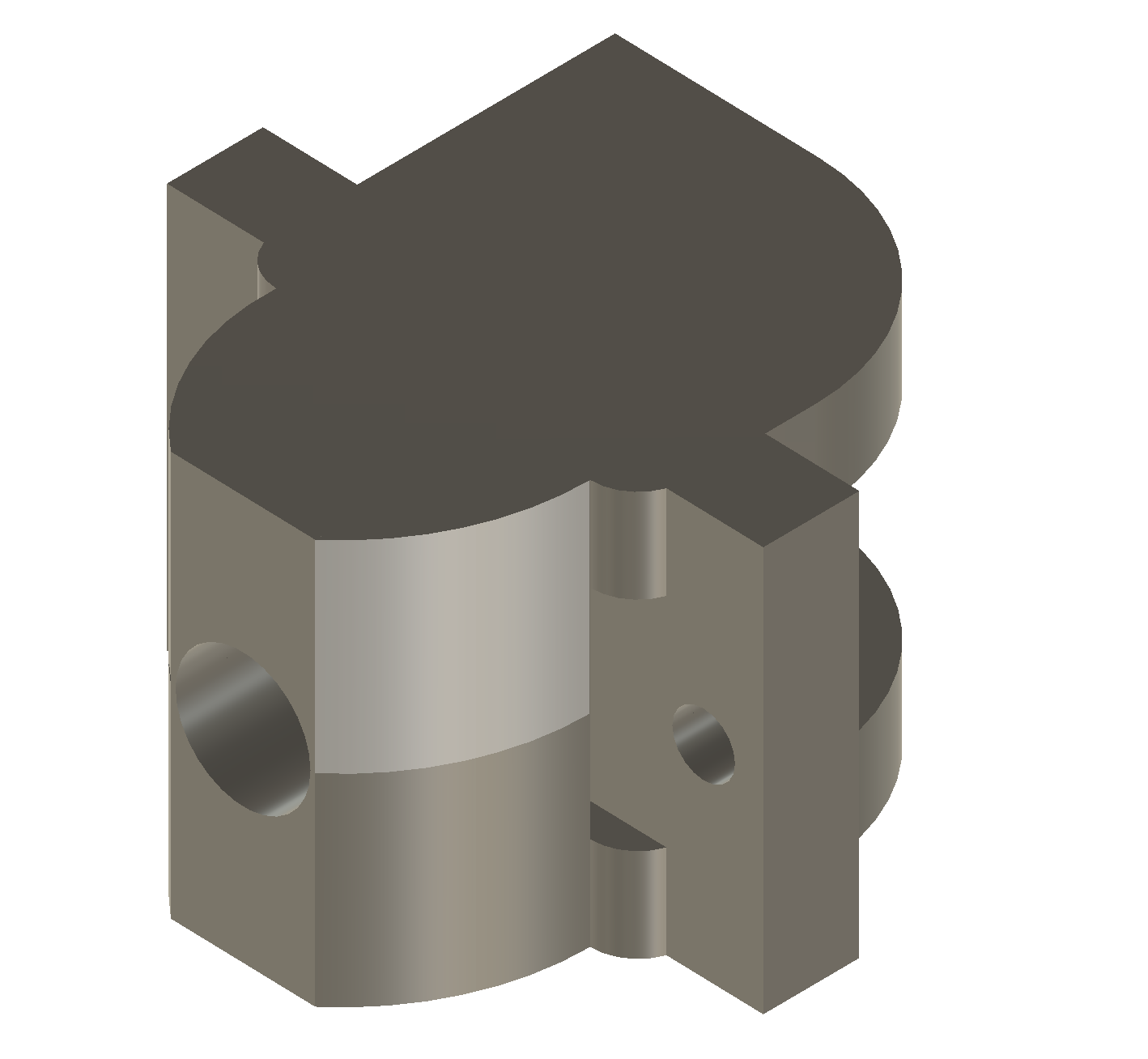
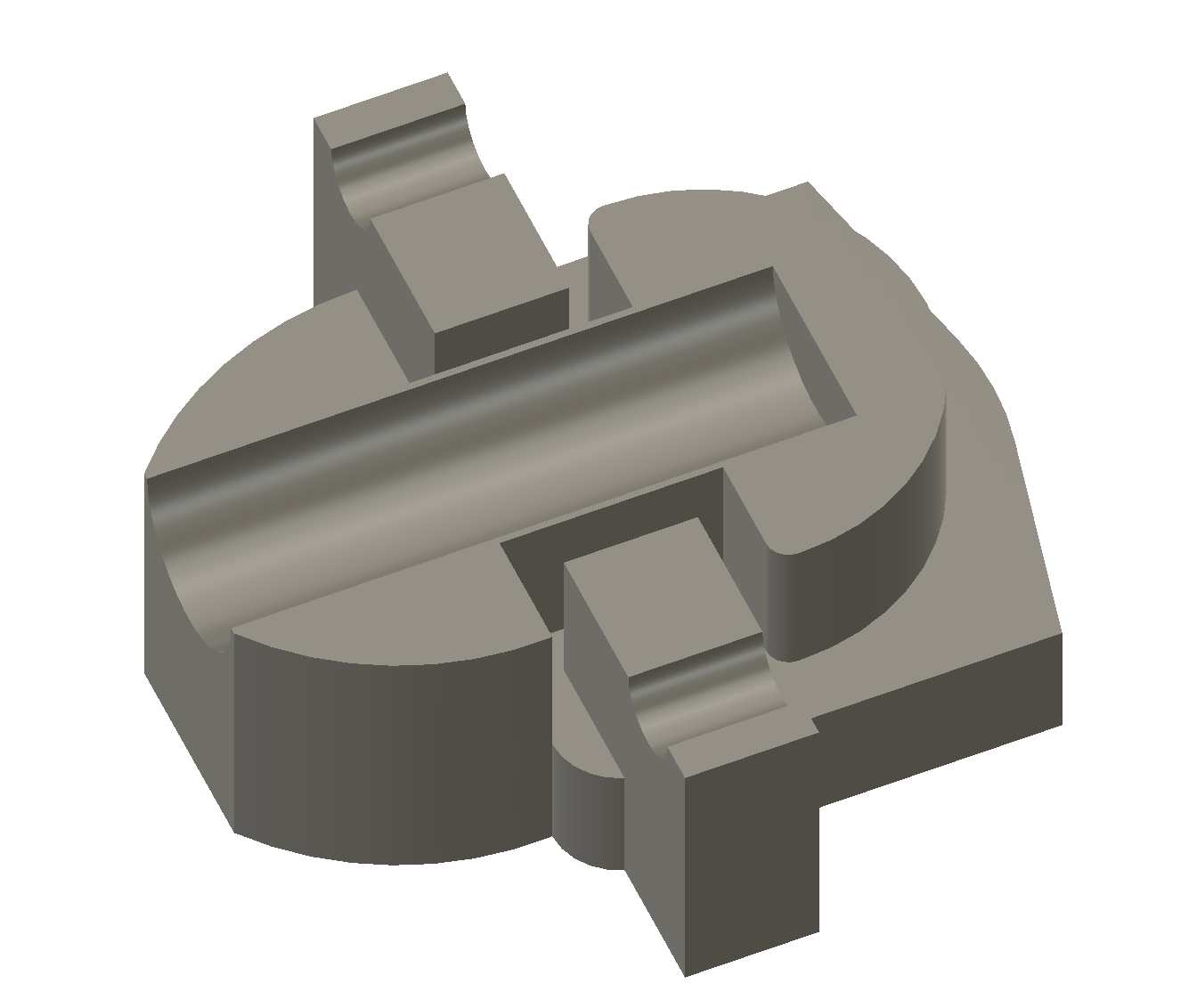
Rolling-Contact / Non-Traditional Finger Joints
I moved beyond simple pin joints to achieve smoother, more human-like motion and force transmission. The rolling-contact joints explored here draw from biological joints and precision mechanisms, emphasizing cam surfaces, rolling interfaces, and constrained motion over software compensation.
- Reduced backlash and wear versus revolute joints.
- Smoother torque transfer and more natural finger trajectories.
- Mechanical intelligence before software intelligence.
Tendon-Driven Finger Actuation Concepts
I investigated tendon / cable-driven fingers to move motors closer to the palm or forearm, lowering distal mass and increasing dexterity. This work focused on biomechanics-inspired routing and control coupling, rather than a servo-per-joint approach.
- Elasticity, hysteresis, and tension management in tendon routing.
- Tension control versus position control for stable grasping.
- Tradeoffs between underactuated and fully actuated fingers.
Force, Compliance, and Tactile Interaction
The goal was not just motion, but safe and expressive interaction. I prioritized compliance both in materials and in control to avoid brittle, rigid grasps.
- Passive compliance through joint design and material selection.
- Active compliance through impedance and admittance control.
- Hands are for interaction, not just positioning.
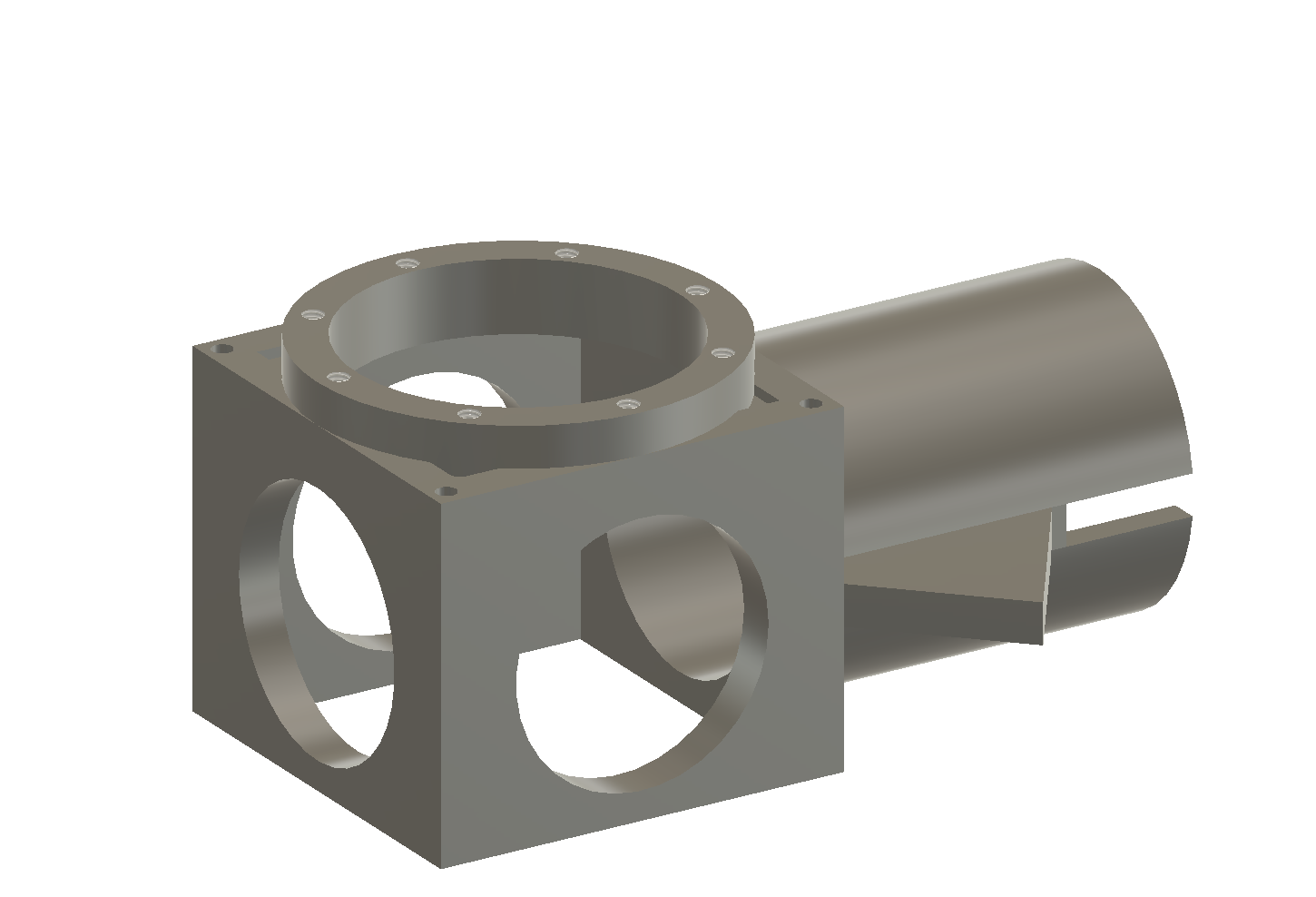
Manufacturing-Constrained Design (Real-World Buildability)
Every design decision was filtered through buildability. The project emphasized simple assemblies and serviceable parts that can be printed, tuned, and repaired without custom machining.
- 3D-printable joint geometries with realistic tolerances.
- Off-the-shelf bearings, tendons, and fasteners.
- Elegance includes manufacturability.
Prototype Videos
Early videos of the robotic hand in motion.